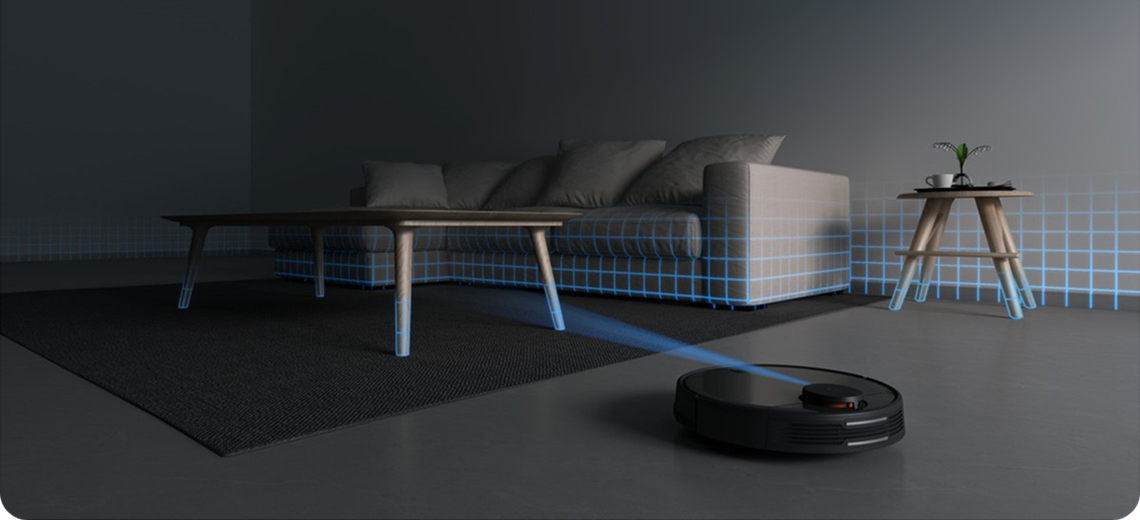
После того, как интеллектуальный подметальный робот создаст карту дома с помощью алгоритма SLAM на основе таких датчиков, как лазерные датчики дальности и инерциальные измерительные устройства, он затем определяет местоположение в соответствии с площадью дома и в то же время планирует интеллектуальный и эффективный путь уборки с помощью ИИ. алгоритм, который может эффективно избежать пропущенного сканирования. Повторное сканирование, и серверная сторона постоянно итеративно обновляет алгоритм робота за счет глубокого обучения и оптимизации алгоритмов сетевых данных о продуктах.
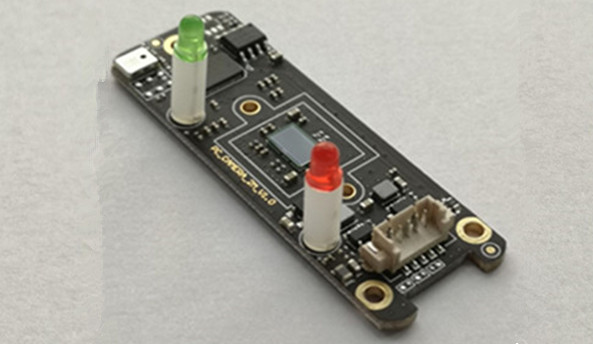
Это также означает, что подметальный робот интегрирует несколько датчиков, таких как лидар, 3D-тоф, бинокулярные камеры, а также алгоритмы искусственного интеллекта, распознавание голоса и так далее. С точки зрения оптики подметальные роботы также нуждаются в сотрудничестве с производителями камер, включая чипы, модули и алгоритмы.
Связать модули камеры